Rotation using Euler Angles
Published:
I have always found rotation using Euler angles confusing. This post is just a simple note to maintain my sanity while performing rigid body transformations using Euler angles and rotational matrices.
Rotation
Rotational matrices are special orthogonal matrices. I am not going to discuss any property of these matrices over here. But this post is a quick reference for rotation using z-y-x Euler angles. For further details, you can refer to this.
Euler Angle Transformation
The most important thing you must remember before reading further about transformations using Euler angles is:
The order of matrix multiplication of rotational matrices is of extreme importance.
- Euler angles are used to specify the orientation of one reference frame relative to another reference frame.
- Euler angles are specified by the three angles, viz., $\psi$, $\theta$, $\phi$.
- Euler angles represent three consecutive rotations in the order of $\psi$, $\theta$, $\phi$ so that one coordinate axes system is made to coincide with another system.
- Again, the order of rotation, i.e., $\psi$, $\theta$, $\phi$, is very very important.
- Angle $\psi$ - Angle to be rotated about the current frame's Z-axis.
- Angle $\theta$ - Angle to be rotated about the current frame's Y-axis.
- Angle $\phi$ - Angle to be rotated about the current frame's X-axis.
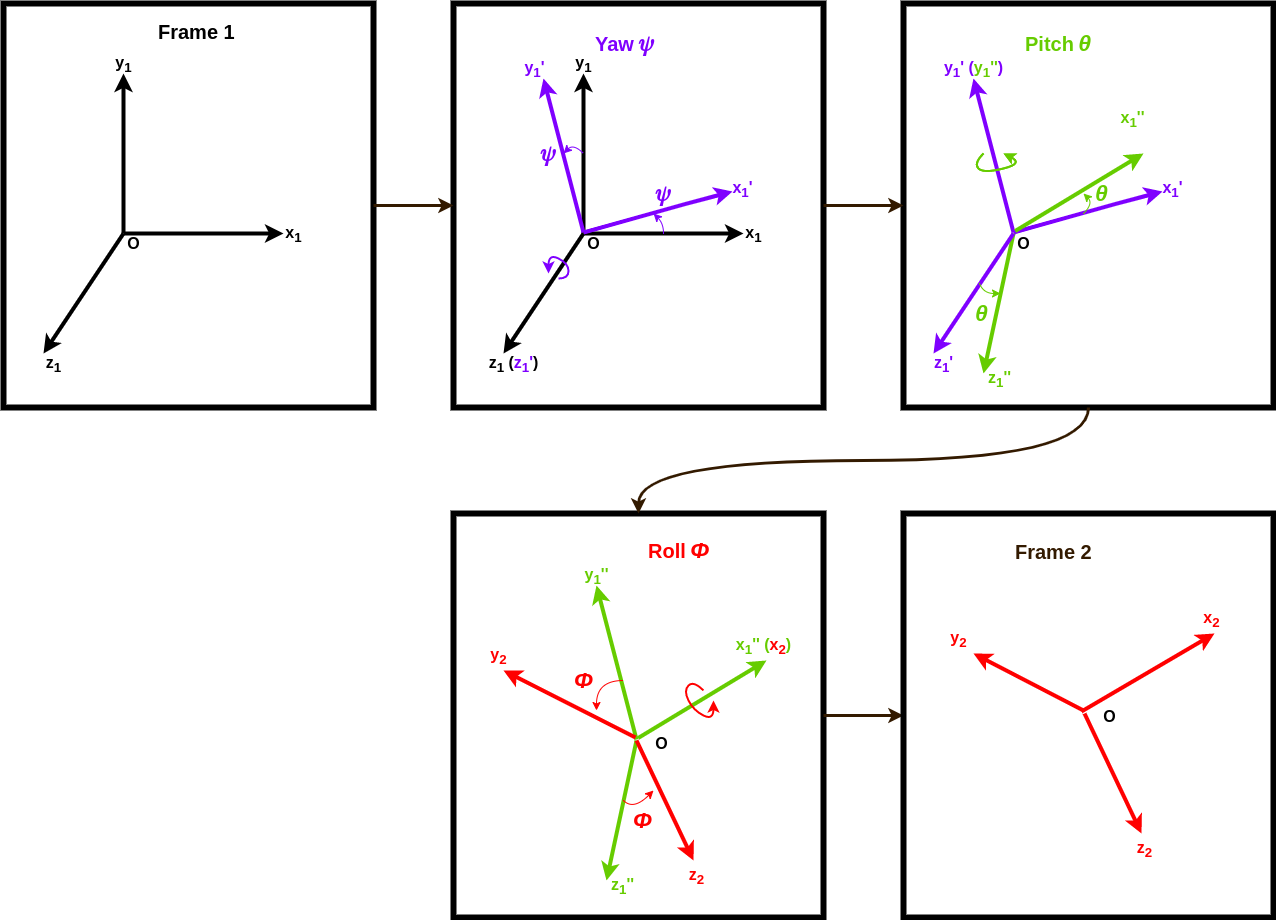
Sequence of rotation of three Euler angles:
Let’s say one has to go from frame 1 to frame 2 using Euler angle \(\psi\), \(\theta\), \(\phi\). Lets start with the current frame, i.e., frame 1.
- Original Frame: $Ox_{1}y_{1}z_{1}$
- Target Frame: $Ox_{2}y_{2}z_{2}$
- Angle $\psi$ is the rotation about $Oz_{1}$.
- This transformation takes frame $Ox_{1}y_{1}z_{1}$ to frame $Ox_{1}^{\prime}y_{1}^{\prime}z_{1}^{\prime}$
- $Ox_{1}$ is rotated to $Ox_{1}^{\prime}$
- $Oy_{1}$ is rotated to $Oy_{1}^{\prime}$
- $Oz_{1}$ is rotated to $Oz_{1}^{\prime}$. The axes $Oz_{1}$ and $Oz_{1}^{\prime}$ overlap with each other.
- One should note, $Oy_{1}^{\prime}$ now falls in the plane $Oy_{2}z_{2}$ and $Ox_{1}^{\prime}$ now falls in the plane $Ox_{2}z_{2}$. These two planes are in the target frame of reference.
- Angle $\theta$ is rotation about $Oy_{1}^{\prime}$.
- This transformation takes frame $Ox_{1}^{\prime}y_{1}^{\prime}z_{1}^{\prime}$ to frame $Ox_{1}^{\prime\prime}y_{1}^{\prime\prime}z_{1}^{\prime\prime}$.
- $Ox_{1}^{\prime}$ is rotated to $Ox_{1}^{\prime\prime}$.
- $Oy_{1}^{\prime}$ is rotated to $Oy_{1}^{\prime\prime}$. The axes $Oy_{1}^{\prime}$ and $Oy_{1}^{\prime\prime}$ overlap with each other.
- $Oz_{1}^{\prime}$ is rotated to $Oz_{1}^{\prime\prime}$.
- $Ox_{1}^{\prime\prime}$ now coincides with the axes $Ox_{2}$ and $Oz_{1}^{\prime\prime}$ now falls in the plane $Oy_{2}z_{2}$. The axis $Ox_{2}$ and the plane $Oy_{2}z_{2}$ are in the target frame of reference.
- Angle $\phi$ is rotation about $Ox_{1}^{\prime\prime}$.
- This transformation takes frame $Ox_{1}^{\prime\prime}y_{1}^{\prime\prime}z_{1}^{\prime\prime}$ to frame $Ox_{1}^{\prime\prime\prime}y_{1}^{\prime\prime\prime}z_{1}^{\prime\prime\prime}$. The resulting frame $Ox_{1}^{\prime\prime\prime}y_{1}^{\prime\prime\prime}z_{1}^{\prime\prime\prime}$ is also the target frame $Ox_{2}y_{2}z_{2}$.
- $Ox_{1}^{\prime\prime}$ is rotated to $Ox_{1}^{\prime\prime\prime}$ ($Ox_{2}$).
- $Oy_{1}^{\prime\prime}$ is rotated to $Oy_{1}^{\prime\prime\prime}$ ($Oy_{2}$).
- $Oz_{1}^{\prime\prime}$ is rotated to $Oz_{1}^{\prime\prime\prime}$ ($Oz_{2}$).
- $Oy_{1}^{\prime\prime\prime}$ now coincides with the axes $Oy_{2}$ and $Oz_{1}^{\prime\prime\prime}$ coincides with the axis $Oz_{2}$. The axes $Oy_{2}$ and $Oz_{2}$ are in the target frame of reference.
Constrains on three Euler angles:
Euler angle rotation using rotation matrices faces the issue of singularity or gimbal lock. These angle rotations are constraint to avoid ambiguities. The limits are as follows:
\[-\pi \le \psi \le \pi\] \[-\frac{\pi}{2} \le \theta \le \frac{\pi}{2}\] \[-\pi \le \phi \le \pi\]Rotational Transformations
Let there be two frames defined as start frame and target frame.
- Start Frame: \(Ox_{1}y_{1}z_{1}\)
- Target Frame: \(Ox_{2}y_{2}z_{2}\)
- A point \(p\) is defined in the start and target frames as \(p^{1}\) and \(p^{2}\) respectively.
Now, with the help of Euler angles, transform the point given in the start frame to the corresponding point in the target frame.
Note: Order of transformation is: (1) Angle \(\psi\) along \(Oz_{1}\); (2) Angle \(\theta\) along \(Oy_{1}^{\prime}\); (3) Angle \(\phi\) along \(Ox_{1}^{\prime\prime}\).
- Rotation by \(\psi\) along \(Oz_{1}\): This transforms point \(p^{1}\) in frame \(Ox_{1}y_{1}z_{1}\) to point \(p^{1^{\prime}}\) in frame $Ox_{1}^{\prime}y_{1}^{\prime}z_{1}^{\prime}$.
- The above transformation is followed by \(\theta\) around \(Oy_{1}^{\prime}\) and then by \(\phi\) around \(Ox_{1}^{\prime\prime}\).
Therefore, the resultant transformation matrix for going from Frame \(Ox_{1}y_{1}z_{1}\) to Frame \(Ox_{2}y_{2}z_{2}\) is:
\[p^{2} = R_{1^{\prime\prime}_{x=\phi}}^{2} R_{1^{\prime}_{y=\theta}}^{1^{\prime\prime}} R_{1_{z=\psi}}^{1^{\prime}} p^{1}\]
Code
The code for euler angle transformation is available on Google Colab: ![]()
You can also find the corresponding notebook on github:
References
- Pamadi, B. N. (2004). Performance, stability, dynamics, and control of airplanes. American Institute of aeronautics and astronautics.
Leave a Comment